STMicroelectronics VL53L5CX daudzzonu lidojuma laika diapazona sensors

Ievads
Šīs lietotāja rokasgrāmatas mērķis ir izskaidrot, kā rīkoties ar VL53L5CX lidojuma laika (ToF) sensoru, izmantojot ultra Lite draivera (ULD) API. Tajā ir aprakstītas galvenās ierīces programmēšanas funkcijas, kalibrēšana un izvades rezultāti.
VL53L5CX ir moderns, ToF, daudzzonu diapazona sensors, kas uzlabo STMicroelectronics Flight Sense produktu saimi. Tas ir ievietots miniatūrā atkārtoti plūstošā iepakojumā, un tajā ir integrēts SPAD masīvs, fiziskie infrasarkanie filtri un difrakcijas optiskie elementi (DOE), lai sasniegtu vislabāko veiktspēju dažādos apkārtējā apgaismojuma apstākļos, izmantojot dažādus pārklājuma stikla materiālus.
Daudzzonu attāluma mērījumi ir iespējami līdz 8 × 8 zonām ar plašu 63° diagonālo lauku view (FoV), kas var būt
samazināts ar programmatūru. Katra VL53L5CX zona mēra attālumu līdz mērķim līdz 4 metriem ar maksimālo frekvenci 60 Hz.
Pateicoties STMicroelectronics patentētajiem histogrammas algoritmiem, VL53L5CX spēj noteikt dažādus objektus FoV.
Histogramma nodrošina arī imunitāti pret stikla šķērsrunu, kas pārsniedz 60 cm.

Atsauces
VL53L5CX datu lapa (DS13754).
Akronīmi un saīsinājumi
| Akronīms/saīsinājums | Definīcija |
| DOE | difrakcijas optiskais elements |
| FoV | jomā view |
| I²C | savstarpēji integrētā shēma (seriālā kopne) |
| Kcps/SPAD | Kilo skaits sekundē uz lāpstiņu (vienība, ko izmanto, lai kvantitatīvi noteiktu fotonu skaitu SPAD masīvā) |
| RAM | brīvpiekļuves atmiņa |
| SCL | sērijas pulksteņa līnija |
| SDA | sērijas dati |
| SPAD | viena fotona lavīnas diode |
| ToF | Lidojuma laiks |
| ULD | ultra viegls draiveris |
| VCSEL | vertikālās dobuma virsmas izstarojošā diode |
| VHV | ļoti augsts tilptage |
| Xtalk | šķērsruna |
Funkcionālais apraksts
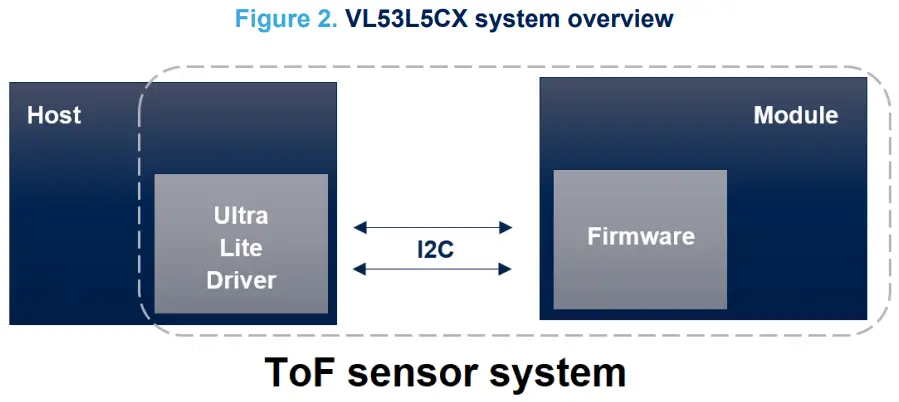
Sistēma beigusiesview
Sistēma VL53L5CX sastāv no aparatūras moduļa un ultra Lite draivera programmatūras (VL53L5CX ULD), kas darbojas resursdatorā (skatiet attēlu zemāk). Aparatūras modulis satur ToF sensoru. STMicroelectronics nodrošina programmatūras draiveri, kas šajā dokumentā tiek saukts par "draiveri". Šajā dokumentā ir aprakstītas draivera funkcijas, kas ir pieejamas resursdatoram. Šīs funkcijas kontrolē sensoru un iegūst diapazona datus.
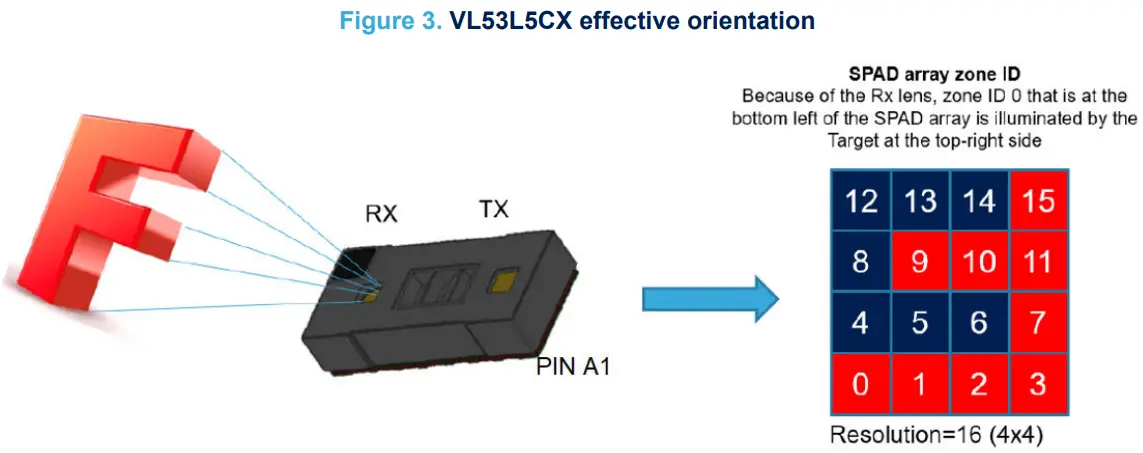
Efektīva orientācija
Modulis ietver objektīvu virs Rx diafragmas, kas pagriež (horizontāli un vertikāli) uzņemto mērķa attēlu. Līdz ar to zona, kas identificēta kā zona 0, SPAD masīva apakšējā kreisajā stūrī, tiek apgaismota ar mērķi, kas atrodas ainas augšējā labajā pusē.
Shēmas un I²C konfigurācija
Saziņu starp draiveri un programmaparatūru nodrošina I²C, kas spēj darboties līdz 1 MHz. Īstenošanai nepieciešama SCL un SDA līniju pievilkšana. Papildinformāciju skatiet VL53L5CX datu lapā.
Ierīces VL53L5CX noklusējuma I²C adrese ir 0x52. Tomēr ir iespējams mainīt noklusējuma adresi, lai izvairītos no konfliktiem ar citām ierīcēm, vai atvieglot vairāku VL53L5CX moduļu pievienošanu sistēmai, lai nodrošinātu lielāku sistēmas FoV. I²C adresi var mainīt, izmantojot funkciju vl53l5cx_set_i2c_address().
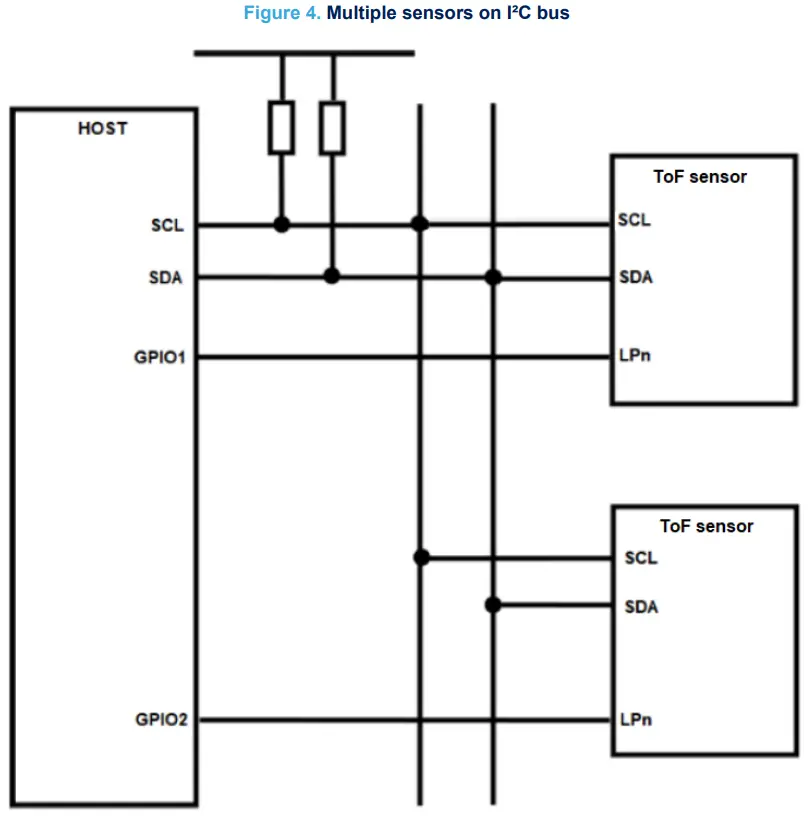
Lai ļautu mainīt ierīces I²C adresi, neietekmējot citus I²C kopnēs, ir svarīgi atspējot I²C sakarus ierīcēm, kuras netiek mainītas. Procedūra ir šāda:
- Ieslēdziet sistēmu kā parasti.
- Novelciet uz leju ierīces LPn tapu, kuras adrese netiks mainīta.
- Pavelciet uz augšu tās ierīces LPn tapu, kurai ir mainīta I²C adrese.
- Ieprogrammējiet I²C adresi ierīcē, izmantojot funkciju set_i2c_address().
- Pavelciet uz augšu ierīces, kas netiek pārprogrammēta, LPn tapu.
Tagad visām ierīcēm jābūt pieejamām I²C kopnē. Atkārtojiet iepriekš minētās darbības visām sistēmas VL53L5CX ierīcēm, kurām nepieciešama jauna I²C adrese.
Pakotnes saturs un datu plūsma
Draivera arhitektūra un saturs
VL53L5CX ULD pakotne sastāv no četrām mapēm. Draiveris atrodas mapē / VL53L5CX_ULD_API.
Vadītājs sastāv no obligātajām un izvēles files. Neobligāti files ir plugins izmanto, lai paplašinātu ULD funkcijas.
Katrs spraudnis sākas ar vārdu “vl53l5cx_plugin” (piemēram, vl53l5cx_plugin_xtalk.h). Ja lietotājs nevēlas piedāvāto plugins, tos var noņemt, neietekmējot citas draivera funkcijas. Nākamais skaitlis parāda obligāto files un izvēles plugins.
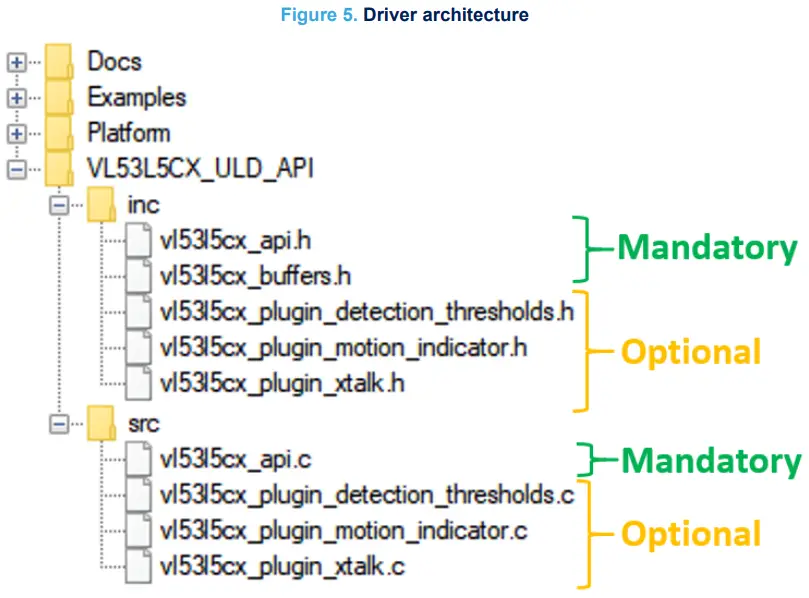
Lietotājam ir jāievieš arī divi files atrodas mapē /Platform. Piedāvātā platforma ir tukša čaula, un tā ir jāaizpilda ar īpašām funkcijām.
Piezīme: Platforma.h file satur obligātus makro, lai izmantotu ULD. Visi file saturs ir obligāts, lai pareizi izmantotu ULD.
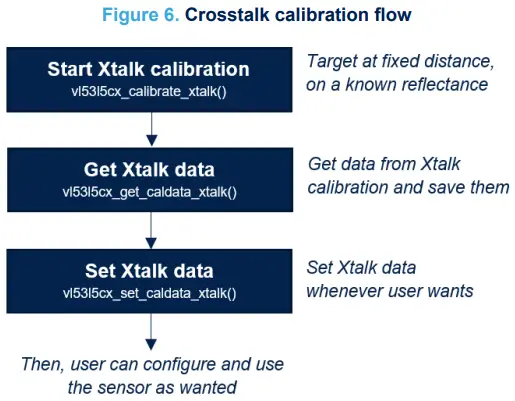
Kalibrēšanas plūsma
Šķērsruna (Xtalk) ir definēta kā signāla daudzums, kas saņemts SPAD masīvā, kas ir saistīts ar VCSEL gaismas atstarošanu aizsarglogā (pārsegstikls), kas pievienots moduļa augšpusē. VL53L5CX modulis ir paškalibrēts, un to var izmantot bez papildu kalibrēšanas.
Šķērsruna kalibrēšana var būt nepieciešama, ja modulis ir aizsargāts ar vāka stiklu. Pateicoties histogrammas algoritmam, VL53L5CX ir imūna pret šķērsrunu, kas pārsniedz 60 cm. Tomēr nelielos attālumos zem 60 cm Xtalk var būt lielāks par faktisko atgriezto signālu. Tas rada nepareizu mērķa nolasījumu vai liek mērķiem izskatīties tuvāk, nekā tie patiesībā ir. Visas šķērsrunas kalibrēšanas funkcijas ir iekļautas Xtalk spraudnī (pēc izvēles). Lietotājam ir jāizmanto file 'vl53l5cx_plugin_xtalk'.
Šķērsrunu var kalibrēt vienu reizi, un datus var saglabāt, lai vēlāk tos varētu izmantot atkārtoti. Nepieciešams mērķis noteiktā attālumā ar zināmu atstarošanas koeficientu. Minimālais nepieciešamais attālums ir 600 mm, un mērķim ir jāaptver viss FoV. Atkarībā no iestatījuma lietotājs var mainīt iestatījumus, lai pielāgotu šķērsrunas kalibrēšanu, kā ieteikts nākamajā tabulā.
Tabula 1. Pieejamie kalibrēšanas iestatījumi
| Iestatījums | Min | Ierosināja STMicroelectronics | Maks |
| Attālums [mm] | 600 | 600 | 3000 |
| S skaitsamples | 1 | 4 | 16 |
| Atspīdums [%] | 1 | 3 | 99 |
Piezīme: Palielinot s skaituamples palielina precizitāti, bet arī palielina kalibrēšanas laiku. Laiks attiecībā pret s skaituamples ir lineārs, un vērtības seko aptuvenajam taimautam:
- 1 sample ≈ 1 sekunde
- 4 sampmazāk ≈ 2.5 sekundes
- 16 sampmazāk ≈ 8.5 sekundes
Kalibrēšana tiek veikta, izmantojot funkciju vl53l5cx_calibrate_xtalk(). Šo funkciju var izmantot jebkurā laikā. Tomēr sensors vispirms ir jāinicializē. Nākamajā attēlā ir parādīta šķērsruna kalibrēšanas plūsma.
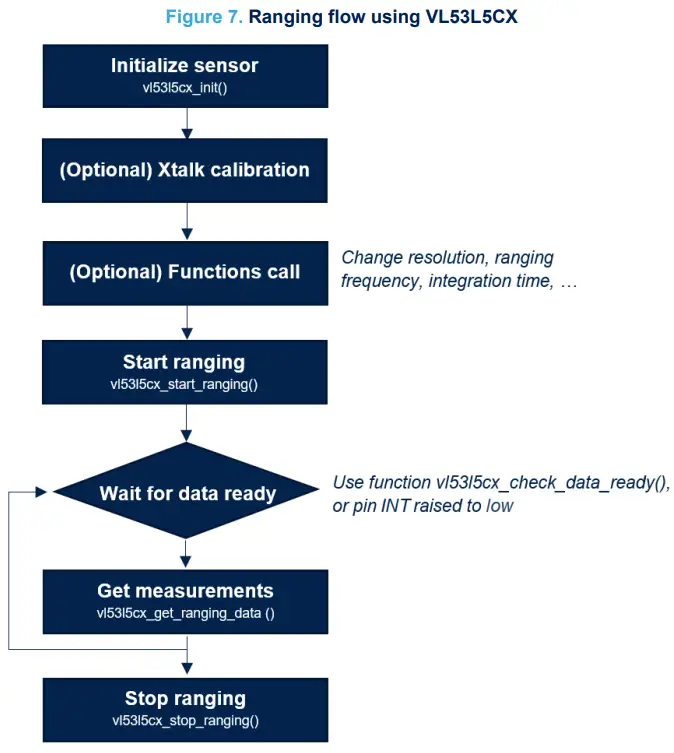
Diapazona plūsma
Nākamajā attēlā parādīta diapazona plūsma, kas izmantota mērījumu iegūšanai. Pirms attāluma noteikšanas sesijas sākšanas ir jāizmanto Xtalk kalibrēšana un papildu funkciju izsaukumi. Iegūt/iestatīt funkcijas nevar izmantot diapazona sesijas laikā, un lidojuma laikā programmēšana netiek atbalstīta.
Pieejamās funkcijas
VL53L5CX ULD API ietver vairākas funkcijas, kas ļauj lietotājam noregulēt sensoru atkarībā no lietošanas gadījuma. Visas vadītājam pieejamās funkcijas ir aprakstītas nākamajās sadaļās.
Inicializācija
Pirms sensora VL53L5CX lietošanas ir jāveic inicializācija. Šī darbība prasa, lai lietotājs:
- Ieslēdziet sensoru (VDDIO, AVDD, LPn tapas ir iestatītas uz High, un tapas I2C_RST ir iestatītas uz 0)
- Izsauciet funkciju vl53l5cx_init(). Funkcija kopē programmaparatūru (~84 KB) modulī. Tas tiek darīts, ielādējot kodu I²C saskarnē un veicot sāknēšanas procedūru, lai pabeigtu inicializāciju.
Sensoru atiestatīšanas pārvaldība
Lai atiestatītu ierīci, ir jāpārslēdz šādas tapas:
- Iestatiet kontaktus VDDIO, AVDD un LPn uz zemu.
- Pagaidiet 10 ms.
- Iestatiet VDDIO, AVDD un LPn tapas uz augstu.
Piezīme: Pārslēdzot tikai I2C_RST tapu, tiek atiestatīta I²C komunikācija.
Izšķirtspēja
Izšķirtspēja atbilst pieejamo zonu skaitam. Sensoram VL53L5CX ir divas iespējamās izšķirtspējas: 4×4 (16 zonas) un 8×8 (64 zonas). Pēc noklusējuma sensors ir ieprogrammēts 4 × 4.
Funkcija vl53l5cx_set_resolution() ļauj lietotājam mainīt izšķirtspēju. Tā kā diapazona frekvence ir atkarīga no izšķirtspējas, šī funkcija ir jāizmanto pirms diapazona frekvences atjaunināšanas. Turklāt izšķirtspējas maiņa palielina arī trafika lielumu I²C kopnē, kad tiek nolasīti rezultāti.
Diapazona frekvence
Diapazona frekvenci var izmantot, lai mainītu mērījumu frekvenci. Tā kā maksimālā frekvence atšķiras no 4×4 un 8×8 izšķirtspējas, šī funkcija ir jāizmanto pēc izšķirtspējas izvēles. Minimālās un maksimālās pieļaujamās vērtības ir norādītas nākamajā tabulā.
Tabula 2. Minimālās un maksimālās diapazona frekvences
| Izšķirtspēja | Minimālā diapazona frekvence [Hz] | Maksimālā diapazona frekvence [Hz] |
| 4 × 4 | 1 | 60 |
| 8 × 8 | 1 | 15 |
Diapazona frekvenci var atjaunināt, izmantojot funkciju vl53l5cx_set_ranging_frequency_hz(). Pēc noklusējuma diapazona frekvence ir iestatīta uz 1 Hz.
Diapazona režīms
Diapazona režīms ļauj lietotājam izvēlēties starp augstu veiktspēju vai zemu enerģijas patēriņu. Tiek piedāvāti divi režīmi:
- Nepārtraukts: ierīce nepārtraukti uztver kadrus ar lietotāja noteiktu diapazona frekvenci. VCSEL ir iespējots visu diapazonu laikā, tāpēc maksimālais attālums un apkārtējās vides imunitāte ir labāki. Šis režīms ir ieteicams ātriem mērījumiem vai augstai veiktspējai.
- Autonoms: šis ir noklusējuma režīms. Ierīce nepārtraukti uztver kadrus ar lietotāja noteiktu diapazona frekvenci. VCSEL ir iespējots lietotāja noteiktā laika posmā, izmantojot funkciju vl53l5cx_set_integration_time_ms(). Tā kā VCSEL ne vienmēr ir iespējots, enerģijas patēriņš ir samazināts. Ieguvumi ir acīmredzamāki ar samazinātu diapazona frekvenci. Šis režīms ir ieteicams mazjaudas lietojumiem.
Diapazona režīmu var mainīt, izmantojot funkciju vl53l5cx_set_ranging_mode().
Integrācijas laiks
Integrācijas laiks ir funkcija, kas pieejama tikai, izmantojot autonomo attāluma noteikšanas režīmu (skatiet 4.5. Sadaļu: Attāluma noteikšanas režīms). Tas ļauj lietotājam mainīt laiku, kamēr VCSEL ir iespējots. Integrācijas laika maiņa, ja diapazona noteikšanas režīms ir iestatīts uz nepārtrauktu, neietekmē. Noklusējuma integrācijas laiks ir iestatīts uz 5 ms.
Integrācijas laika ietekme ir atšķirīga 4 × 4 un 8 × 8 izšķirtspējai. Izšķirtspēja 4 × 4 sastāv no viena integrācijas laika, un 8 × 8 izšķirtspēja sastāv no četriem integrācijas laikiem. Sekojošie skaitļi parāda VCSEL emisiju abām izšķirtspējām.
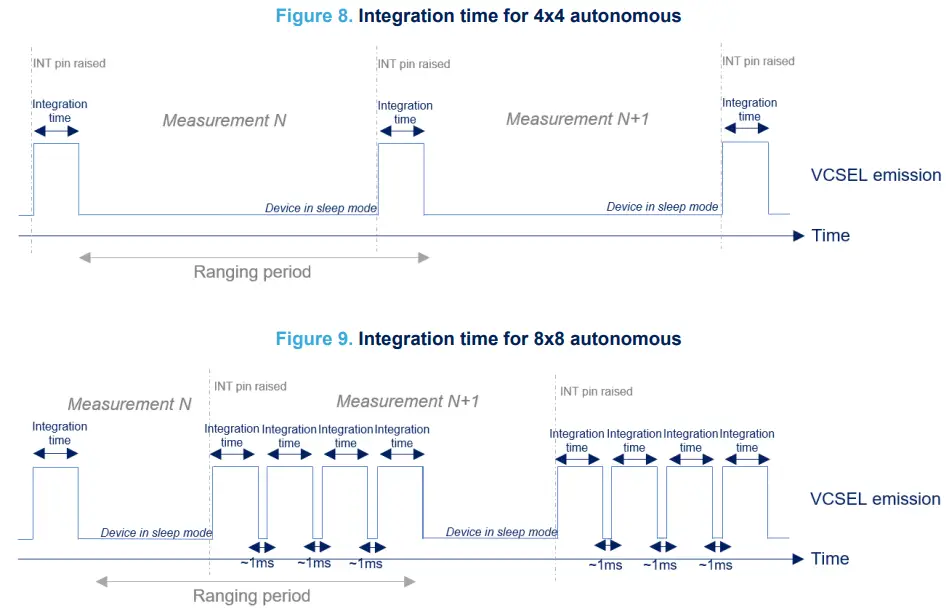
Visu integrācijas laiku + 1 ms pieskaitāmajai summai ir jābūt mazākai par mērīšanas periodu. Pretējā gadījumā diapazona periods tiek automātiski palielināts.
Jaudas režīmi
Strāvas režīmus var izmantot, lai samazinātu enerģijas patēriņu, kad ierīce netiek lietota. VL53L5CX var darboties vienā no šiem jaudas režīmiem:
- Modināšana: ierīce ir iestatīta HP dīkstāvē (lieljauda), gaidot norādījumus.
- Miega režīms: ierīce ir iestatīta LP dīkstāvē (zema jauda), mazjaudas stāvoklī. Ierīci nevar izmantot, kamēr tā nav iestatīta modināšanas režīmā.
Šajā režīmā tiek saglabāta programmaparatūra un konfigurācija.
Jaudas režīmu var mainīt, izmantojot funkciju vl53l5cx_set_power_mode(). Noklusējuma režīms ir pamošanās.
Piezīme: Ja lietotājs vēlas mainīt barošanas režīmu, ierīce nedrīkst būt diapazona noteikšanas stāvoklī.
Asi
Signāls, kas tiek atgriezts no mērķa, nav tīrs impulss ar asām malām. Apmales ir slīpas un var ietekmēt blakus zonās norādītos attālumus. Asināmais tiek izmantots, lai noņemtu daļu vai visu signālu, ko izraisa aizsegs atspīdums.
Bijušaisample parādīts nākamajā attēlā, attēlo tuvu mērķi 100 mm attālumā, kas centrēts FoV, un citu mērķi, kas atrodas tālāk 500 mm attālumā. Atkarībā no asinātāja vērtības tuvais mērķis var parādīties vairākās zonās nekā īstais.
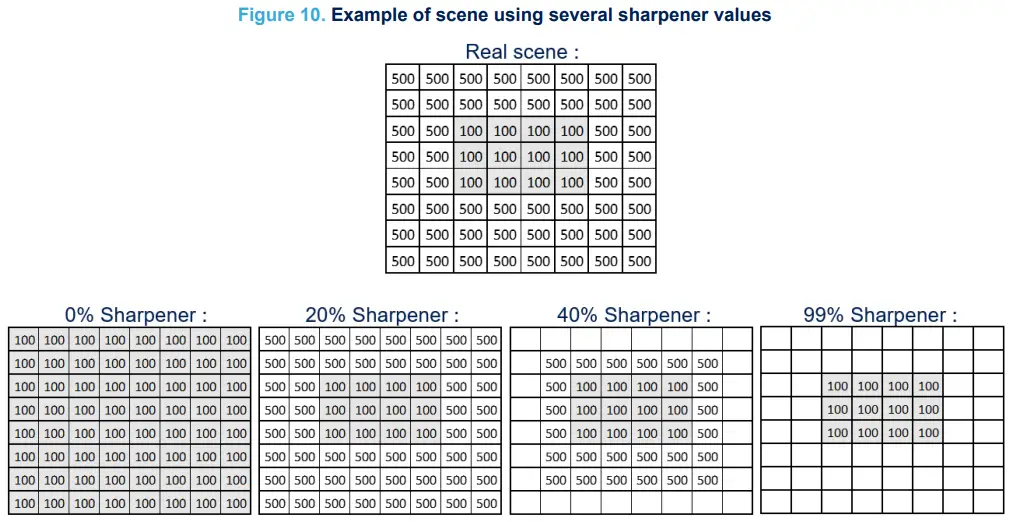
Asinātāju var mainīt, izmantojot funkciju vl53l5cx_set_sharpener_percent(). Atļautās vērtības ir no 0% līdz 99%. Noklusējuma vērtība ir 5%.
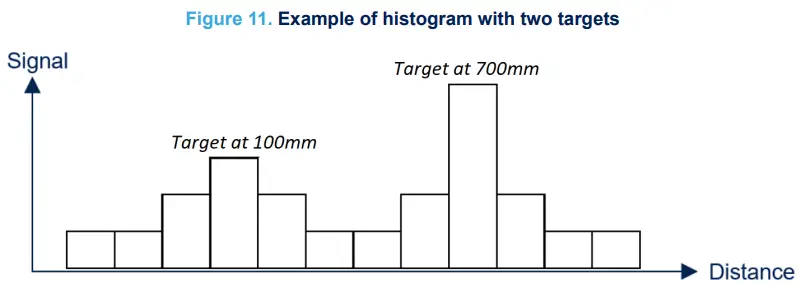
Mērķa pasūtījums
VL53L5CX var izmērīt vairākus mērķus katrā zonā. Pateicoties histogrammas apstrādei, saimniekdators var izvēlēties ziņoto mērķu secību. Ir divas iespējas:
- Tuvākais: tuvākais mērķis ir pirmais ziņotais
- Spēcīgākais: spēcīgākais mērķis ir pirmais, par kuru ziņots
Mērķa secību var mainīt, izmantojot funkciju vl53l5cx_set_target_order(). Noklusējuma secība ir Strongest.
Bijušaisample nākamajā attēlā attēlo divu mērķu noteikšanu. Viens 100 mm ar zemu atstarošanas spēju un otrs 700 mm ar augstu atstarošanas spēju.
Vairāki mērķi vienā zonā
VL53L5CX var izmērīt līdz četriem mērķiem katrā zonā. Lietotājs var konfigurēt sensora atgriezto mērķu skaitu.
Piezīme: Minimālais attālums starp diviem nosakāmajiem objektiem ir 600 mm.
Izvēle nav iespējama no vadītāja; tas ir jādara 'Platform.h' file. Makro VL53L5CX_NB_ TARGET_PER_ZONE ir jāiestata uz vērtību no 1 līdz 4. Mērķa secība, kas aprakstīta 4.9. sadaļā: Mērķa secība, tieši ietekmē konstatētā mērķa secību. Pēc noklusējuma sensors izvada ne vairāk kā vienu mērķi katrā zonā.
Piezīme: Palielināts mērķu skaits zonā palielina nepieciešamo RAM lielumu
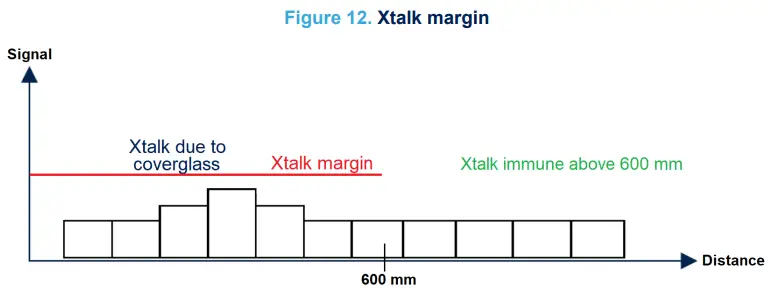
Xtalk mala
Xtalk piemale ir papildu funkcija, kas pieejama tikai, izmantojot spraudni Xtalk. .c un .f files 'vl53l5cx_plugin_xtalk' ir jāizmanto.
Piemale tiek izmantota, lai mainītu noteikšanas slieksni, ja sensora augšpusē ir vāka stikls. Pēc šķērsrunas kalibrēšanas datu iestatīšanas slieksni var palielināt, lai nodrošinātu, ka vāka stikls nekad netiek atklāts. Piemēram,ampe, lietotājs var veikt šķērsrunas kalibrēšanu vienā ierīcē un atkārtoti izmantot tos pašus kalibrēšanas datus visām pārējām ierīcēm. Xtalk rezervi var izmantot, lai noregulētu šķērsrunas korekciju. Zemāk redzamais skaitlis parāda Xtalk rezervi.
Atklāšanas sliekšņi
Papildus parastajām diapazona noteikšanas iespējām sensoru var ieprogrammēt tā, lai tas noteiktu objektu saskaņā ar noteiktiem iepriekš noteiktiem kritērijiem. Šī funkcija ir pieejama, izmantojot spraudni “atklāšanas sliekšņi”, kas ir opcija, kas API nav iekļauta pēc noklusējuma. The files, ko sauc par "vl53l5cx_plugin_detection_thresholds", ir jāizmanto.
Funkciju var izmantot, lai aktivizētu A3 (INT) tapas pārtraukumu, ja ir izpildīti lietotāja noteiktie nosacījumi. Ir trīs iespējamās konfigurācijas:
- Izšķirtspēja 4 × 4: izmantojot vienu slieksni katrā zonā (kopā 16 sliekšņi)
- Izšķirtspēja 4 × 4: izmantojot divus sliekšņus katrā zonā (kopā 32 sliekšņi)
- Izšķirtspēja 8 × 8: izmantojot vienu slieksni katrā zonā (kopā 64 sliekšņi)
Neatkarīgi no izmantotās konfigurācijas sliekšņu izveides procedūra un RAM lielums ir vienādi. Katrai sliekšņa kombinācijai ir jāaizpilda vairāki lauki: - Zonas id: atlasītās zonas id (skatiet 2.2. sadaļu: Efektīvā orientācija)
- Mērīšana: mērīšana, lai noķertu (attālums, signāls, SPAD skaits, …)
- Tips: mērījumu logi (logos, ārpus logiem, zem zemā sliekšņa, …)
- Zems slieksnis: zema sliekšņa lietotājs aktivizētājam. Lietotājam nav jāiestata formāts, to automātiski apstrādā API.
- Augsts slieksnis: augsta sliekšņa lietotājs, lai aktivizētu. Lietotājam nav jāiestata formāts; to automātiski apstrādā API.
- Matemātiskā darbība: tiek izmantota tikai 4 × 4 — 2 sliekšņa kombinācijām katrā zonā. Lietotājs var iestatīt kombināciju, izmantojot vairākus sliekšņus vienā zonā.
Kustības indikators
Sensoram VL53L5CX ir iegulta programmaparatūras funkcija, kas ļauj noteikt kustību ainā. Kustības indikators tiek aprēķināts starp secīgiem kadriem. Šī opcija ir pieejama, izmantojot spraudni'vl53l5cx_plugin_motion_indicator'.
Kustības indikators tiek inicializēts, izmantojot funkciju vl53l5cx_motion_indicator_init(). Lai mainītu sensora izšķirtspēju, atjauniniet kustības indikatora izšķirtspēju, izmantojot speciālo funkciju: vl53l5cx_motion_indicator_set_resolution().
Lietotājs var arī mainīt minimālo un maksimālo attālumu kustības noteikšanai. Atšķirība starp minimālo un maksimālo attālumu nedrīkst būt lielāka par 1500 mm. Pēc noklusējuma attālumi tiek inicializēti ar vērtībām no 400 mm līdz 1500 mm.
Rezultāti tiek saglabāti laukā 'motion_indicator'. Šajā laukā masīvs “motion” dod vērtību, kas satur kustības intensitāti katrā zonā. Augsta vērtība norāda uz lielu kustības variāciju starp kadriem. Tipiska kustība dod vērtību no 100 līdz 500. Šī jutība ir atkarīga no integrācijas laika, mērķa attāluma un mērķa atstarošanas.
Ideāla kombinācija mazjaudas lietojumiem ir kustības indikatora izmantošana ar autonomu diapazona noteikšanas režīmu un kustībai ieprogrammēti noteikšanas sliekšņi. Tas ļauj noteikt kustības izmaiņas FoV ar minimālu enerģijas patēriņu.
Periodiska temperatūras kompensācija
Diapazona veiktspēju ietekmē temperatūras svārstības. Sensorā VL53L5CX ir iestrādāta temperatūras kompensācija, kas tiek kalibrēta vienreiz, kad sākas straumēšana. Tomēr, ja temperatūra mainās, kompensācija var netikt saskaņota ar jauno temperatūru. Lai izvairītos no šīs problēmas, klients var veikt periodisku temperatūras kompensāciju, izmantojot automātisko VHV. Periodiskajai temperatūras kalibrēšanai nepieciešamas dažas milisekundes. Lietotājs var noteikt periodu.
Lai izmantotu šo funkciju, klientam ir nepieciešams:
• Izsauciet funkciju vl53l5cx_set_VHV_repeat_count().
• Pēc tam kā argumentu norādiet kadru skaitu starp katru jauno kalibrēšanu.
Ja arguments ir 0, kompensācija tiek atspējota.
Rādīšanas rezultāti
Pieejamie dati
Displeja darbības laikā var tikt izvadīts plašs mērķa un vides datu saraksts. Nākamajā tabulā ir aprakstīti lietotājam pieejamie parametri.
Tabula 3. Pieejamā izeja, izmantojot sensoru VL53L5CX
| Elements | Nb baiti (RAM) | Vienība | Apraksts |
| Ambient pēc SPAD | 256 | Kcps/SPAD | Apkārtējā ātruma mērījums, kas veikts SPAD masīvā bez aktīvas fotonu emisijas, lai izmērītu apkārtējā signāla ātrumu trokšņa dēļ. |
| Atklāto mērķu skaits | 64 | Nav | Atklāto mērķu skaits pašreizējā zonā. Šai vērtībai ir jābūt pirmajai, kas jāpārbauda, lai uzzinātu mērījumu derīgumu. |
| Iespējoto SPAD skaits | 256 | Nav | Pašreizējam mērījumam iespējoto SPAD skaits. Tālu vai zemu atstarojošs mērķis aktivizē vairāk SPAD. |
| Signāls uz SPAD | 256 x nb mērķi ieprogrammēti | Kcps/SPAD | VCSEL impulsa laikā izmērītais fotonu daudzums. |
| Diapazona sigma | 128 x nb mērķi ieprogrammēti | Milimetru | Sigma novērtētājs trokšņiem ziņotajā mērķa attālumā. |
| Attālums | 128 x nb mērķi ieprogrammēti | Milimetru | Mērķa attālums |
| Mērķa statuss | 64 x nb mērķi ieprogrammēti | Nav | Mērījumu derīgums. Skat 5.5. sadaļa: Rezultāti interpretācija lai iegūtu vairāk informācijas. |
| Atspīdums | Ieprogrammēti 64 x mērķi | Procenti | Paredzamā mērķa atstarošana procentos |
| Kustības indikators | 140 | Nav | Struktūra, kas satur kustības indikatora rezultātus. Laukā “kustība” ir norādīta kustības intensitāte. |
Piezīme: Vairākiem elementiem (signal per spad, sigma, ...) piekļuve datiem ir atšķirīga, ja lietotājs ir ieprogrammējis vairāk nekā vienu mērķi vienā zonā (skatiet 4.10. Sadaļu: Vairāki mērķi vienā zonā). Skatīt example kodiem, lai iegūtu vairāk informācijas.
Pielāgojiet izvades izvēli
Pēc noklusējuma visas VL53L5CX izejas ir iespējotas. Ja nepieciešams, lietotājs var atspējot dažas sensoru izejas.
Mērījumu atspējošana vadītājam nav pieejama; tas jāveic 'Platform.h' file. Lietotājs var deklarēt šādus makro, lai atspējotu izejas:
#define VL53L5CX_DISABLE_AMBIENT_PER_SPAD
#define VL53L5CX_DISABLE_NB_SPADS_ENABLED
#define VL53L5CX_DISABLE_NB_TARGET_DETECTED
#define VL53L5CX_DISABLE_SIGNAL_PER_SPAD
#define VL53L5CX_DISABLE_RANGE_SIGMA_MM
#define VL53L5CX_DISABLE_DISTANCE_MM
#define VL53L5CX_DISABLE_TARGET_STATUS
#define VL53L5CX_DISABLE_REFLECTANCE_PERCENT
#define VL53L5CX_DISABLE_MOTION_INDICATOR
Līdz ar to lauki netiek deklarēti rezultātu struktūrā, un dati netiek pārsūtīti uz resursdatoru. RAM un I²C lielums ir samazināts.
Lai nodrošinātu datu konsekvenci, ST vienmēr iesaka saglabāt iespējotus “atklāto mērķu skaitu” un “mērķa statusu”. Tas filtrē mērījumus atkarībā no mērķa statusa (skatiet 5.5. sadaļu: Rezultātu interpretācija).
Atbilstošu rezultātu iegūšana
Diapazona sesijas laikā ir divi veidi, kā uzzināt, vai ir pieejami jauni diapazona dati.
- Aptaujas režīms: nepārtraukti izmanto funkciju vl53l5cx_check_data_ready(). Tas nosaka jaunu straumju skaitu, ko atgriež sensors.
- Pārtraukšanas režīms: gaida, līdz tiek parādīts pārtraukums uz tapas A3 (GPIO1). Pārtraukums tiek automātiski notīrīts pēc ~ 100 μs.
Kad jauni dati ir gatavi, rezultātus var nolasīt, izmantojot funkciju vl53l5cx_get_ranging_data(). Tas atgriež atjauninātu struktūru, kurā ir visa atlasītā izvade. Tā kā ierīce ir asinhrona, lai turpinātu diapazona sesiju, nav jādzēš pārtraukumi.
Šī funkcija ir pieejama gan nepārtrauktas, gan autonomas diapazona noteikšanas režīmiem.
Neapstrādāta programmaparatūras formāta izmantošana
Pēc diapazona datu pārsūtīšanas caur I²C notiek konvertēšana starp programmaparatūras formātu un resursdatora formātu. Šo darbību parasti veic, lai kā sensora noklusējuma izvade būtu diapazona attālums milimetros. Ja lietotājs vēlas izmantot programmaparatūras formātu, platformā ir jādefinē šāds makro file: VL53L5CX
#define VL53L5CX_USE_RAW_FORMAT
Rezultātu interpretācija
VL53L5CX atgrieztos datus var filtrēt, lai ņemtu vērā mērķa statusu. Statuss norāda mērījuma derīgumu. Pilns statusu saraksts ir aprakstīts nākamajā tabulā.
Tabula 4. Pieejamā mērķa statusa saraksts
| Mērķa statuss | Apraksts |
| 0 | Diapazona dati netiek atjaunināti |
| 1 | Signāla ātrums ir pārāk zems SPAD masīvā |
| 2 | Mērķa fāze |
| 3 | Sigma aprēķinātājs ir pārāk augsts |
| 4 | Mērķa konsekvence neizdevās |
| 5 | Diapazons derīgs |
| 6 | Aptīšana nav veikta (parasti pirmais diapazons) |
| 7 | Likmes konsekvence neizdevās |
| 8 | Signāla ātrums ir pārāk zems pašreizējam mērķim |
| 9 | Diapazons derīgs ar lielu impulsu (var būt saistīts ar apvienotu mērķi) |
| 10 | Diapazons ir derīgs, taču iepriekšējā diapazonā nav konstatēts neviens mērķis |
| 11 | Mērījumu konsekvence neizdevās |
| 12 | Asinātāja dēļ mērķis ir aizmiglots ar citu |
| 13 | Mērķis ir atklāts, taču dati ir pretrunīgi. Bieži notiek ar sekundāriem mērķiem. |
| 255 | Nav konstatēts neviens mērķis (tikai tad, ja ir iespējots atklāto mērķu skaits) |
Lai iegūtu konsekventus datus, lietotājam ir jāfiltrē nederīgs mērķa statuss. Lai sniegtu ticamības novērtējumu, mērķis ar statusu 5 tiek uzskatīts par 100% derīgu. Statusu 6 vai 9 var uzskatīt ar ticamības vērtību 50%. Visi pārējie statusi ir zem 50% ticamības līmeņa.
Vadītāja kļūdas
Ja, izmantojot sensoru VL53L5CX, rodas kļūda, draiveris atgriež īpašu kļūdu. Nākamajā tabulā ir norādītas iespējamās kļūdas.
Tabula 5. Izmantojot draiveri, pieejamo kļūdu saraksts
| Mērķa statuss | Apraksts |
| 0 | Nav kļūdu |
|
127 |
Lietotājs ieprogrammēja nepareizu iestatījumu
(nezināma izšķirtspēja, diapazona frekvence ir pārāk augsta, …) |
| 255 | Būtiska kļūda. Parasti taimauta kļūda I²C kļūdas dēļ. |
| cits | Vairāku iepriekš aprakstīto kļūdu kombinācija |
Piezīme: Izmantojot platformu, saimniekdators var ieviest vairāk kļūdu kodu files.
Pārskatīšanas vēsture
Tabula 6. Dokumentu pārskatīšanas vēsture
| Datums | Versija | Izmaiņas |
| 21-jūnijs-2021 | 1 | Sākotnējā izlaišana |
| 30.-2021. augusts | 2 | Pievienots 5.4. sadaļa: neapstrādāta programmaparatūras formāta izmantošana
Pievienots jauns mērķa statuss 13 collas 4. tabula. Pieejamā mērķa statusa saraksts |
| 05-septembris-2022 | 3 | Pievienota piezīme par minimālo attālumu starp mērķiem līdz 4.10. sadaļa: vairāki mērķi vienā zonā |
| 10.-2023. augusts | 4 | Pārveidots 11. attēls. Piemample histogrammas ar diviem mērķiem |
| 21. gada 2024. februāris | 5 | Pievienots VHV (ļoti liels tilpumstage) uz 1. sadaļa. Akronīmi un saīsinājumi. Pievienots 4.14. sadaļa: Periodiskā temperatūras kompensācija |
SVARĪGS PAZIŅOJUMS – UZMANĪGI IZLASIET
STMicroelectronics NV un tā meitasuzņēmumi (“ST”) patur tiesības jebkurā laikā bez brīdinājuma veikt izmaiņas, labojumus, uzlabojumus, modifikācijas un uzlabojumus ST izstrādājumos un/vai šajā dokumentā. Pirms pasūtījuma veikšanas pircējiem jāiegūst jaunākā atbilstošā informācija par ST produktiem. ST produkti tiek pārdoti saskaņā ar ST pārdošanas noteikumiem un nosacījumiem, kas ir spēkā pasūtījuma apstiprināšanas brīdī.
Pircēji ir pilnībā atbildīgi par ST produktu izvēli, izvēli un lietošanu, un ST neuzņemas nekādu atbildību par palīdzību pielietošanā vai pircēja produktu dizainu.
ST šeit nepiešķir nekādas tiešas vai netiešas licences jebkādām intelektuālā īpašuma tiesībām.
ST produktu tālākpārdošana ar noteikumiem, kas atšķiras no šeit norādītās informācijas, anulē jebkādu ST piešķirto garantiju šādam produktam.
ST un ST logotips ir ST preču zīmes. Papildinformāciju par ST preču zīmēm skatiet www.st.com/trademarks. Visi pārējie produktu vai pakalpojumu nosaukumi ir to attiecīgo īpašnieku īpašums.
Informācija šajā dokumentā aizstāj un aizstāj informāciju, kas iepriekš sniegta jebkurās iepriekšējās šī dokumenta versijās.
© 2024 STMicroelectronics – visas tiesības paturētas

Dokumenti / Resursi
 |
STMicroelectronics VL53L5CX daudzzonu lidojuma laika diapazona sensors [pdfLietotāja rokasgrāmata VL53L5CX daudzzonu lidojuma laika diapazona sensors, VL53L5CX, daudzzonu lidojuma laika diapazona sensors, lidojuma laika diapazona sensors, lidojuma attāluma sensors, attāluma sensors, sensors |



